Kada radite s Arduinom, mnogi radioamateri koriste motor korak po korak. Ali što je ovo? Kako ga spojiti? I kako raditi s njim? I općenito, gdje se koriste? Odgovori na sva ova pitanja bit će predstavljeni u ovom članku.
O koračnim motorima
Može se reći da su koračni motori temelj precizne robotike. Oni se koriste svugdje zbog svoje točnosti. Činjenica je da koračni motori koriste male korake pri okretanju vratila, što im omogućuje preciznost pri radu. To je zahvaljujući "koracima" od njih i počeo se zove koračni motori. Uzmite, na primjer, pisač. Tu se također koristi koračni motor. Ili bilo koji manipulator, gdje je točnost vrlo važna, jer čak i ako robot napravi pogrešku pola stupnja - sve će krenuti naopako. Analogni koračni motori mogu se smatrati servo pogonima, jer njihovo programiranje također pokazuje stupanj rotacije, ali servo slabije od koračnih motora u točnosti. No, postoje mnoge situacije u kojima je upotreba servo pogona prikladnija od upotrebe "hodalica".
Koračni motor 28BYJ-48
Među mnogim izborom koračnih motora upravo je koračni motor modela 28BYJ-48. Trošak je prilično jeftin, samo 100-150 rubalja po komadu. Kako izgleda koračni motor za Ardouine može se vidjeti na slici ispod.

Mnogi radioamateri preferiraju ovaj model zbog niskih cijena i dobre točnosti. Tip motora - unipolarni, broj faza - 4. Potrošnjakoračni motor za Arduinov od 5 do 12V. Međutim, preporučljivo je koristiti 6-7V. Motori mogu raditi na dva načina: u punom stupnju i na pola koraka. Preporučuje se za uporabu u polu-taktnom modu. To je 5625 stupnjeva po koraku. Kada se puni korak po korak daje 1125 stupnjeva. Težina motora - 30 grama.
Vozač ULN2003
Za povezivanje koračnog motora s Arduinovima koristi se poseban upravljački program. Jedan od njih je ULN2003. To je zbog činjenice da kada koračni motor radi, snaga struje je prilično jaka, što Arduino kontakti jednostavno ne mogu izdržati. Da biste to učinili, koristi se upravljački program. Sami motor spaja se s upravljačkim programom, gotovo je nemoguće sve zbuniti, jer postoji ključ koji pokazuje kako se točno povezati. Pa, a onda se sam vozač spaja na Arduino radi daljnjeg rada. Često se u trgovinama vozač već isporučuje s koračnim motorom. Međutim, postoje slučajevi kada se motori prodaju bez vozača, morate obratiti pozornost na to. Ako kupite Aliexpress, bolje je raditi samo s dokazanim dobavljačima s mnogim recenzijama.
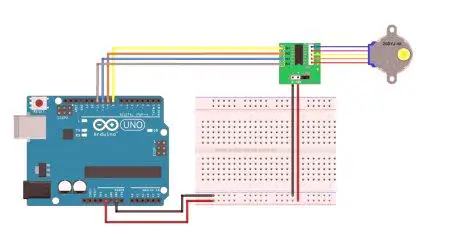
Povezivanje
Kao što je gore spomenuto, vozač se koristi za pokretanje koračnog motora od Arduina. Za napajanje motora morate koristiti drugi izvor kako biste izbjegli preopterećenje Arduino kartice. I drugi zaključci, počevši od IN1 do IN4, povezujemo se na sve digitalne kontakte na "Arduinov". Kao što možete vidjeti, povezivanje koračnog motora s Arduinom je vrlo jednostavno. Na slici možete vidjeti primjer veze.
Ured
upravljanje stepskim motorima iz "Ardouinova" kao dijela razvojnog okruženja već ima gotovu biblioteku koja vam omogućuje kontrolu motora pomoću malog programskog koda. Da nije, morao bi uz pomoć posebne tablice sastaviti i izračunati kretanje motora, što bi zahtijevalo mnogo vremena. Međutim, tu je i minus ove knjižnice. Činjenica je da omogućuje uporabu motora samo u punom stupnju. Iako se u početku preporuča koristiti "stepper" u polu-koraku. Ali za jednostavne projekte koji koriste jedan korak motor, ova knjižnica je prikladna. Zove se Stepper. Možete napisati kod za kontrolu stepper motora iz "Arduin". Skica izgleda kao primjer u nastavku.
# uključuje
const int stepsPerRevolution = 200;
Stepper myStepper (koraciPerRevolution, 891011); //povezivanje s pinovima 811 na Arduinov
void setup () {
myStepper.setSpeed (60); //podešavanje brzine rotora
Serijski broj (9600);
}
void loop () {
//Funkcija čeka naredbu za pretvaranje teksta i šalje signal motoru da ga okrene na određeni broj koraka.
Serial.println ("Premjesti desno"); //u smjeru kazaljke na satu
myStepper.step (stepsPerRevolution);
kašnjenje (1000);
Serial.println ("Premjesti lijevo"); //u smjeru suprotnom od kazaljke na satu
myStepper.step (-stepsPerRevolution);
kašnjenje (1000);
}Ovo je primjer iz same knjižnice za kontrolu koračnih motora. Možete odrediti koliko koraka trebate izvršiti i kojom brzinom. Razmotrite šifru detaljnije. Na samom početku biblioteka Stepper je već povezanarečeno je gore. Nakon toga se kreira niz s brojem koraka koje motor mora izvoditi. Zatim se kreira varijabla tipa steper s podacima pomoću kontakata koji su spojeni na Arduino stepper motor. Brzina je podešena i već je proces kretanja koračnog motora. Ali ako želite koristiti više od jednog motora u projektu i raditi u modu pola koraka, možete koristiti knjižnice trećih strana. Jedan od njih je Accel Stepper. Ova knjižnica se vrlo dobro pokazala u radu, ima mnogo mogućnosti. Kada radite s njezinim koracima su točni, motori se ne zagrijavaju. Općenito se preporučuje za uporabu. Da biste instalirali biblioteku, morate preuzeti i prenijeti sadržaj arhive u mapu Libraries u korijenskom direktoriju Arduino. U ovom smo članku raspravljali o primjeru povezivanja koračnog motora s Arduinovim, kao i njegovom kontrolom pomoću programskog koda. Svaki radioamater mora barem jednom u svojim projektima pokušati raditi s njim!