Elektromotori bez eksplozije koriste se u medicinskoj tehnologiji, aeromodelu, cjevovodima za naftovode, kao iu mnogim drugim industrijama. Ali oni imaju svoje nedostatke, značajke, kao i prednosti koje ponekad igraju ključnu ulogu u dizajniranju različitih uređaja. U svakom slučaju, takvi elektromotori zauzimaju relativno malu nišu u usporedbi s asinkronim AC strojevima.
Značajke elektromotora
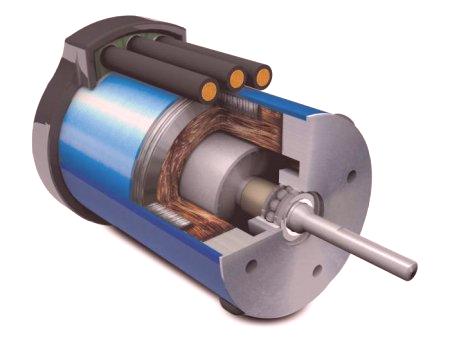
Jedan od razloga zašto su projektanti zainteresirani za precizne elektromotore je potreba za brzim motorima malih veličina. Štoviše, ovi motori imaju vrlo precizno pozicioniranje. Dizajn ima pokretni rotor i stacionarni stator. Na rotoru se nalazi jedan permanentni magnet ili nekoliko, raspoređenih u određenom nizu. Na statoru postoje zavojnice koje stvaraju magnetsko polje.
Treba napomenuti još jednu značajku - elektromotori s punim krugom mogu imati sidro, smješteno i iznutra i izvana. Prema tome, dvije vrste dizajna mogu imati određenu primjenu u različitim sferama. Kada je sidro smješteno unutra moguće je postići vrlo veliku brzinu, tako da ti motori vrlo dobro rade u konstrukcijama sustava hlađenja. U slučaju da je ugrađen pogon s vanjskim rotorom, to je mogućepostići vrlo precizno pozicioniranje, kao i visoku otpornost na preopterećenje. Vrlo često se ovi motori koriste u robotici, medicinskoj opremi i strojevima s kontrolom frekvencije.
Kako motori rade
Kako bi se pogonio rotor elektromotora bez kolektora istosmjerne struje, potrebno je koristiti poseban mikrokontroler. Ne može se pokrenuti na isti način kao sinkroni ili asinkroni stroj. Pomoću mikrokontrolera uključite namotaje motora tako da su pravci vektora magnetskog polja na statoru i sidra ortogonalni.
Drugim riječima, uz pomoć vozača moguće je podesiti okretni moment koji djeluje na rotor kolektora. Za pomicanje sidra potrebno je izvršiti ispravno uključivanje u namotima statora. Nažalost, ne postoji način da se osigura glatka kontrola rotacije. Ali možete vrlo brzo povećati brzinu rotora elektromotora.
Razlike u kolektorskim i kolektorskim motorima
Glavna razlika je u tome što na kolektorskim motorima za modele nema namotaja na rotoru. U slučaju kolektora, njihovi rotori imaju namotaje. No stalni magneti ugrađuju se na stacionarni dio motora. Osim toga, na rotor je instaliran poseban dizajn kolektor, koji je povezan grafitnim četkama. Uz njihovu pomoć, na namota rotora se primjenjuje napon. Također je bitan princip rada kolektorskog elektromotoraje drugačiji.
Kako radi kolektorski stroj
Za pokretanje kolektorskog motora potrebno je primijeniti napon na uzbudni namot koji se nalazi izravno na sidru. U tom slučaju nastaje trajno magnetsko polje koje stupa u interakciju s magnetima na statoru, što dovodi do postavljanja sidara i kolektora. To se hrani takvim namotom, postoji ponavljanje ciklusa.
Brzina rotacije rotora izravno ovisi o intenzitetu magnetskog polja, a potonja karakteristika izravno ovisi o veličini napona. Dakle, za povećanje ili smanjenje brzine vrtnje, morate promijeniti napon napajanja. Da biste izvršili obrnuto, trebate samo promijeniti polaritet priključka motora. Za takvu kontrolu, ne morate koristiti posebne mikrokontrolere, možete mijenjati brzinu rotacije pomoću konvencionalnog izmjeničnog otpornika.
Značajke strojeva za sakupljanje
No ovdje je kontrola punog električnog motora nemoguća bez uporabe posebnih regulatora. Polazeći od toga, možemo zaključiti da se motori ovog tipa kao generator ne mogu koristiti. Za učinkovitu kontrolu možete pratiti položaj rotora s nekoliko Hall senzora. S takvim jednostavnim uređajima moguće je značajno poboljšati performanse, ali će se troškovi elektromotora povećati nekoliko puta.
Pokretanje turbulentnih motora
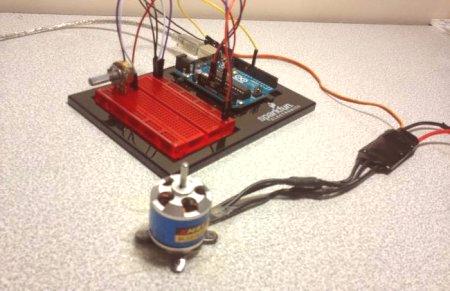
Napravite mikrokontrolere samostalnonema smisla, mnogo bolja opcija će biti kupnja gotovog, neka bude kineski. Ali pri odabiru treba slijediti sljedeće preporuke:
Uzeti u obzir maksimalnu dopuštenu jakost struje. Ova opcija će svakako biti korisna za različite vrste pogona. Proizvođači često navode karakteristike izravno u nazivu modela. Vrlo rijetko ukazuju na vrijednosti karakteristične za vršne modove, pri čemu mikrokontroler ne može dugo raditi.
Za dugotrajan rad potrebno je uzeti u obzir maksimalnu vrijednost napona napajanja.
Svakako vodite računa o otpornosti svih unutarnjih krugova mikrokontrolera.
Važno je uzeti u obzir maksimalni broj okretaja koji je karakterističan za rad mikrokontrolera. Imajte na umu da neće moći povećati maksimalnu brzinu okretanja jer su ograničenja načinjena na softverskoj razini.
Jeftini modeli mikrokontrolerskih uređaja imaju frekvenciju generiranih impulsa u rasponu od 78 kHz. Skupi slučajevi mogu se reprogramirati, a taj se parametar povećava za 2-4 puta.
Pokušajte odabrati mikrokontrolere za sve parametre jer utječu na snagu koju električni motor može razviti.
Kako se provodi upravljanje
Elektronska upravljačka jedinica omogućuje prebacivanje namotaja pogona. Da bi se odredio trenutak uklapanja pomoću vozača, nadzire se položaj rotora iz Hall senzora instaliranog na pogonu.
U slučaju da takvih uređaja nema,potrebno je očitati povratni napon. Stvara se u zavojnicama statora koje nisu povezane u zadano vrijeme. Kontroler je hardverski i softverski kompleks, koji vam omogućuje praćenje svih promjena i precizno određivanje redoslijeda komutacije.
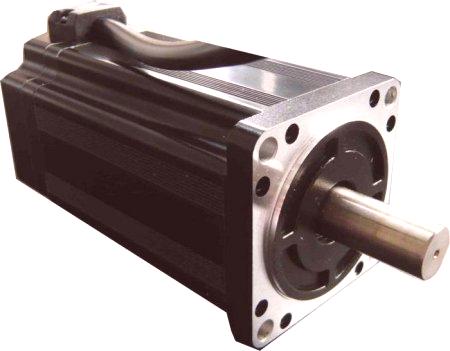
Trofazni turbo-slobodni električni motori
Mnogobrojni puni električni motori za zračne modele izrađeni su za istosmjernu struju. No postoje i trofazni slučajevi u kojima su instalirani pretvarači. Oni vam omogućuju da napravite trofazne impulse od stalnog napona.
Rad je sljedeći:
Impulsi pozitivne vrijednosti primaju se na zavojnicu "A". Na zavojnici "B" - s negativnom vrijednošću. Kao rezultat, sidro će se početi pomicati. Senzori bilježe pristranost i šalju signal kontroleru za sljedeću promjenu.
Postoji odspajanje zavojnice "A", pri čemu puls pozitivne vrijednosti dolazi do namota "C". Promjena namota "B" se neće promijeniti.
Na svitku "C" postoji pozitivan impuls, a negativ ulazi u "A".
Zatim slijedi rad para "A" i "B". Dobivene su pozitivne negativne vrijednosti impulsa.
Zatim pozitivni zamah opet ulazi u zavojnicu "B", a negativ na "Z".
U posljednjem stadiju postoji uključivanje zavojnice "A", koja prima pozitivni impuls, a negativ ide na C.
A onda slijedi ponavljanje cijelog ciklusa.
Prednosti korištenja
Napraviti bezručni elektromotor bez kolekcijeTeško je provoditi kontrolu mikrokontrolera. Stoga je najbolje koristiti gotove industrijske dizajne. Ali budite sigurni da uzmete u obzir prednosti koje pogon dobiva kada koristite kolektorske elektromotore:
Postoji znatno veći resurs od kolektora.
Visoka razina učinkovitosti.
Snaga je veća od snage kolektorskih motora.
Brzina tipkanja je mnogo brža.
Tijekom rada nisu formirane iskre, stoga se mogu koristiti u uvjetima visoke opasnosti od požara.
Vrlo jednostavan rad pogona.
Pri radu nema potrebe za dodatnim komponentama za hlađenje.
Jedan od nedostataka je vrlo visoka cijena, s obzirom na cijenu kontrolera. Čak i za kratko vrijeme, takav električni motor neće se uključiti radi provjere učinkovitosti. Osim toga, popravak takvih motora je mnogo teži zbog značajki dizajna.